Alain Galvan ·10/6/2020 6:00 PM · Updated 2 years ago
An overview of ray tracing denoising, reviewing filtering, spatiotemporal, sampling and AI techniques to improve convergence and temporal coherency in real time ray traced applications.
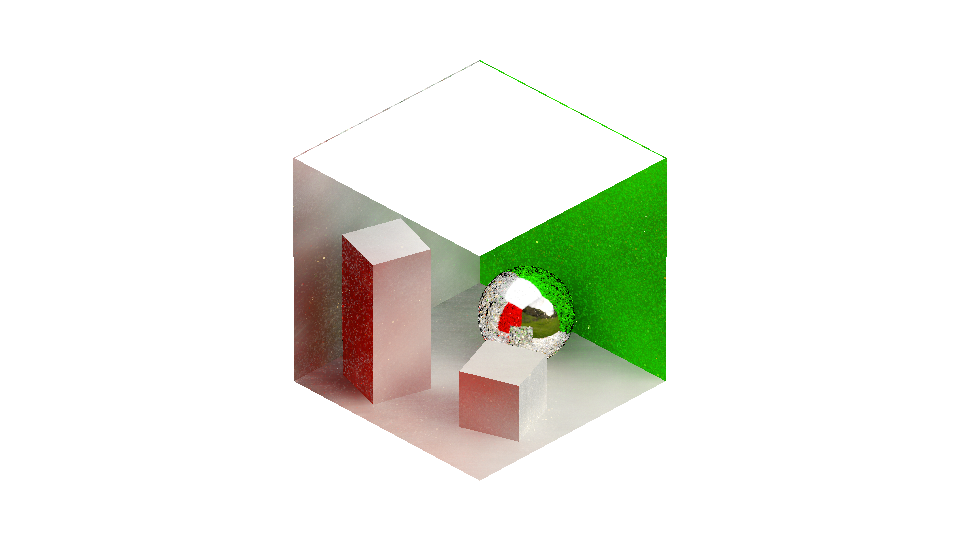
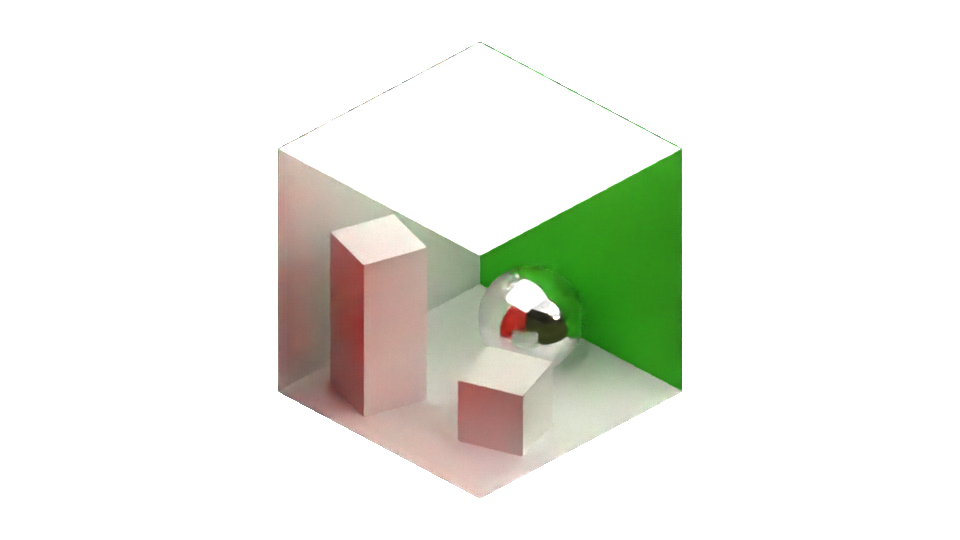
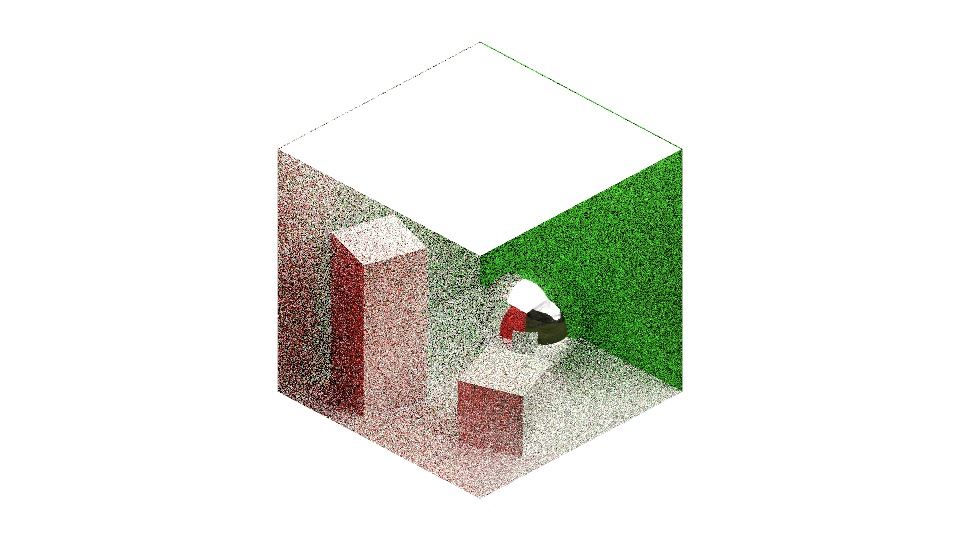
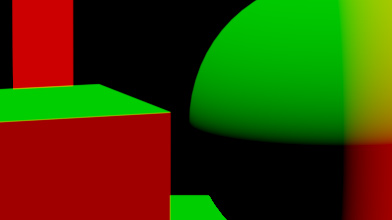
Monte-carlo ray tracing is a technique that relies on accumulating random samples to reach a satisfying approximation of a given scene. This process was traditionally a slow one with plenty of variance, but with the advent of real time ray tracing solutions with recent graphics cards, there's been a resurgence of research in denoising techniques.
These denoising techniques include filtering using guided blurring kernels, machine learning to drive filters or importance sampling, improving sampling schemes through better quasi-random sequences such as blue noise and spatio-temporal reuse of either rays or the final luminance, and approximation techniques that attempt to quantize and cache information with some sort of spatial structure such as probes, irradiance caches, neural radiance fields (NeRFs), etc.
A robust denoiser should consider using all of these techniques depending on the trade-offs and needs of your application.
Recent research has focused on moving denoising to earlier in rendering by improving sampling schemes and re-sampling pixels with cached information, with prior research focused on filtering, autoencoders in machine learning, importance sampling, and real time methods that are currently in production in commercial games and renderers. We'll be discussing key papers on denoising and their implementations, focusing on how to build your own robust real time ray tracing denoiser.
Denoising has seen a significant number of new publications since the release of this article, with techniques such as ReSTIR, NVIDIA's denoising suite, and machine learning techniques improving significantly. This article could use some updates for these recent papers, but the ideas here are still applicable today.
Prior Art
Filtering techniques such as Gaussian, Bilateral, À-Trous[Dammertz et al. 2010], Guided[He et al. 2012], and Median[Mara et al. 2017] filters have been used to blur monte-carlo ray traced images. In particular Guided filters driven by feature buffers such as common G-Buffer attachments in Deferred Rendering like normals, albedo, depth/position, as well as specialized buffers such as first-bounce data, reprojected path length, or view position have been used in recent denoising papers and commercial implementations.
While these filtering techniques are effective and cheap to compute, they come at the cost of a lossy representation of the scene and the reduction of high frequency information like sharp edges. This loss of information can be so drastic that it can even lead to differences in the level of brightness in scenes with salt & peppering occurring in either highlights or shadows.
Industry leaders such as Intel and NVIDIA have sponsored research in machine learning based denoisers, Intel Open Image Denoise and the NVIDIA Optix Autoencoder both use a denoising autoencoder to denoise images to great success. NVIDIA's Deep Learning Super Sampling (DLSS 2.0) has also been used to upscale ray traced applications such as Minecraft RTX, Remedy Entertainment’s Control, and more, with the goal of reducing computational costs by upscaling to native resolutions a fraction of the original image.
Sampling techniques have seen a resurgence in new literature. While a naive monte carlo ray tracer would simply accumulate samples on an unchanging scene, it's possible to reuse samples in a moving scene. Examples include Temporal Anti-Aliasing [Korein et al. 1983][Yang et al. 2020], the Spatio-Temporal Filter [Mara et al. 2017], the Spatio-Temporal Variance Guided Filter (SVGF) [Schied 2017], Spatial Denoising employed by [Abdollah-shamshir-saz 2018], Adaptive SVGF (A-SVGF) [Schied et al. 2018], Blockwise Multi-Order Feature Regression (BMFR) [Koskela et al. 2019]).
These techniques would rely on using high frequency quasi-random sequences such as blue noise (which would be used in combination with filtering) [Benyoub 2019] , as well as common tools such as firefly rejection [Liu et al. 2019], next event estimation (NEE), and importance sampling [Veach 1998].
There have also been attempts to move denoising to earlier in rendering by making sampling less biased through ray hashing [Pantaleoni 2020] or reusing statistics from neighboring sampling probabilities [Bitterli et al. 2020]. Variations of these techniques have emerged that target a smaller subset of ray tracing such as Global Illumination [Boisse 2021] and motion blur [Oberberger et al. 2022], or using tiles for point lights [Tokuyoshi 2022].
In addition, there's approximation techniques that attempt to fine tune behavior for different aspects of a path tracer. The RTX Global Illumination paper approximated ray traced global illumination (GI) with light probes which used ray tracing to better determine the proper radiance of each probe and to position probes in the scene to avoid bleeding or inaccurate interiors. Techniques that can avoid screen space monte carlo integration entirely such as RTXGI also avoid the need for real time denoising routines but can be used together with screen space techniques. RTXGI have been recently integrated to commercial game engines such as Unreal Engine 4 and Unity [Majercik et al. 2020].
Sampling
SVGF
The Spatio-Temporal Variance Guided Filter (SVGF)[Schied 2017] is a denoiser that uses spatio-temporal reprojection along with feature buffers like normals, depth, and variance calculations to drive a bilateral filter to blur regions of high variance.
Minecraft RTX uses a form of SVGF, with the addition of irradiance caching, the use of ray length for better driving reflections, and splitting rendering for transmissive surfaces such as water. SVGF, while very effective, does introduce temporal lag that is noticable in game.
A-SVGF
Adaptive Spatio-Temporal Variance Guided Filtering (A-SVGF)[Schied et al. 2018] improves on SVGF by adaptively reusing previous samples that have been spatially reprojected according to temporal hueristics such as the change in variance, viewing angle, etc. encoded in a Moment Buffer, and filtering that with a fast bilateral filter. So rather than accumulating samples based on history length, the moment buffer acts as an alternative hueristic that uses the change in variance to drive the proportion of old samples and newer samples, resulting in less ghosting. While SVGF only used the moment buffer to drive blurring, A-SVGF uses it for both the filtering and accumulation steps.
Though the introduction of a moment buffer helps with temporal lag it doesn't completely get rid of it. There can be differences in brightness between regions with a high number of accumulated samples and new regions. This is especially evident in darker regions of a raytraced scene such as interiors. To mitigate this, rather than using 1 sample per pixel (1 spp), it's best to use 2 spp in dark areas of a scene.
Quake 2 RTX uses A-SVGF as its denoising solution.
ReSTIR
Spatiotemporal Importance Resampling for Many-Light Ray Tracing (ReSTIR)[Bitterli et al. 2020] attempts to move the spatio-temporal reprojection step of real time denoisers to earlier in rendering, reusing statistics from neighboring sampling probabilities. This is essentially a combination of an earlier paper by [Talbot et al. 2005] discussing Resampled Importance Sampling, and adding ideas introduced by spatio-temporal denoisers.
These remarkable results show yet another example of how rapidly DNNs are finding their place in and evolving modern renders. ~ Marco Salvi (@marcosalvi)
Machine learning techniques such as denoising autoencoders, sample map estimators driving sample counts or importance sampling, neural bilateral grids driving filtering, and super-sampling result in the most drastic improvements in image quality, though these techniques are slower than other algorithms such as A-SVGF.
Intel OIDN
Intel Open Image Denoise (OIDN) is a machine learning autoencoder that takes in a albedo, first bounce normals, and your input noisy image and output a filtered image.
NVIDIA's Optix 7 Denoising Autoencoder[R. Alla Chaitanya et al. 2017] takes in the same inputs as OIDN, an optional albedo, normal, and input noisy image, and outputs a filtered image much faster than Intel's solution at the cost of quality.
Deep Learning Super Sampling (DLSS) is an upscaling technique that that uses a small color buffer and a direction map to multiply the resolution of the output 2-4 times. This is exclusive to developers pre-approved by NVIDIA, so there's currently no way to use this publicly, that being said there's alternatives such as DirectML's SuperResolution Sample.
Denoiser Design
An ideal denoiser that combines ideas from the latest state of the art papers could look like the following:
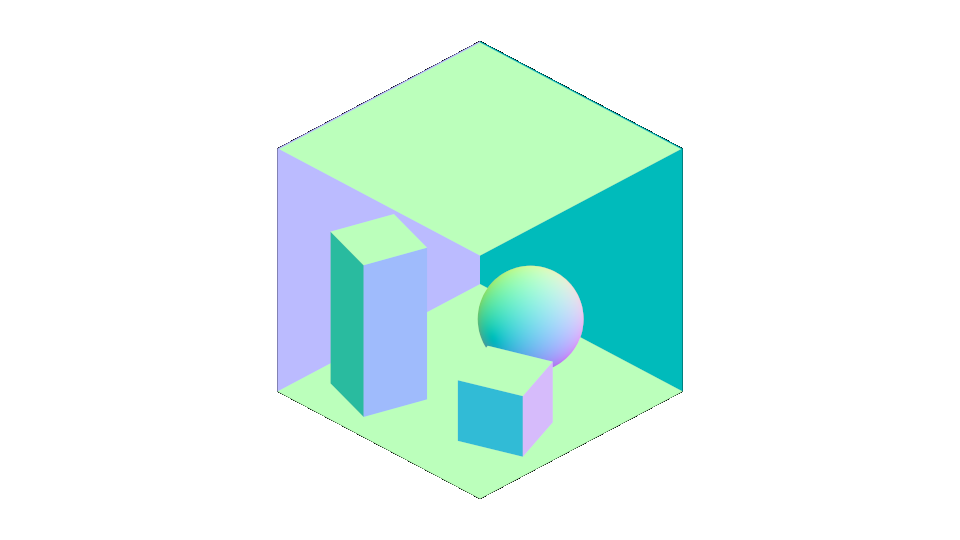
Prepass - Calculate the NDC space velocity of the scene, write common G-Buffer attachments such as albedo, normals etc. You may also want first bounce versions of those buffers, which would require a ray-trace based prepass rather than a raster based one.
Ray Trace - Use AI Adaptive sampling from [Kuznetsov et al. 2018][Hasselgren et al. 2020] with a sample map to better determine which regions should recieve more samples, generally highlights/shadows to help avoid salt/peppering and maintain luminance over time. A split denoiser with Specular Reflections and Global Illumination written to separate attachments would be ideal as Reflection denoising would do better 1st bounce data, Global Illumination/Ambient Occlusion/Shadows can afford to use simpler spatio-temporal accumulation based off less data.
Accumulation - Use Spatio-Temporal Reprojection as often as possible, this is easier to do with lambertian data such as Global Illumination/Ambient Occlusion, and harder with specular data like reflections. For better results, use heuristic data like normals/albedo/object IDs to translate previous samples to the current position, as well as 1st bounce data such as view direction, 1st bounce normals/albedo, etc. Any successful reprojections can then be used to either importance sample [Bitterli et al. 2020] or their radiance encoded to a radiance history buffer [Schied et al. 2018].
Statistical Analysis - estimate the variance of the current ray traced image, calculate the change in variance in luminance/velocity and use that to drive spatio-temporal reprojection and filtering. Attempt to reject fireflies with that variance information.
Filtering - This can be done quickly with an À-Trous bilateral filter, repeat this step 3-5 times depending on how strong of a blur you want, and decrease the stepWidth by a power of 2 each time (so a sequence of 4, 2, 1 in the case of 3 iterations). Alternatively, you could use a denoising autoencoder which will be slower, but can produce better filtering results. That result could then be fed into a super sampling autoencoder that could upscale your results, similar to NVIDIA's DLSS 2.0.
History Blit - Write the current prepass data such as Albedos, Depth, etc. for reprojection next frame.
NVIDIA released an example implementation of a denoiser similar to this that uses ReSTIR [Wyman et al. 2021].
Prepass
Prior to denoising, it's important to encode material information such as Normals, Albedo, Depth/Position, Object ID, Roughness/Metalness, etc. with some sort of General Pass (G-Pass). In addition, having access to velocity makes it possible to translate previous samples to the current position.
A Velocity Buffer can be calculated by determining the previous and current NDC space coordinate positions of each vertex being rendered, and taking the difference of the two.
V=NDCcur−NDCprev
Therefore, one would need the previous modelViewProjection matrix of an object, as well as that object's animation vertex velocity, the difference between in position between the current and previous animation sample.
It's possible to take this concept further, such as using a motion vector for first bounce glossy reflections, a shadow motion vector for better shadow reprojection while objects are moving, and even dual motion vectors for occlusions. [Zeng et al. 2021]
Accumulation
Spatiotemporal reprojection is reusing the data from previous frames, spatially reprojecting them to the current frame. Translating previous samples to the current frame requires that you first find the coordinates in view space for previous frame data, which can be done by just adding the velocity buffer. By comparing difference between the current position/normal/object ID/etc of this screen space coordinate with that of it's previous, you can tell if an object has been previously occluded and is now in view, or reuse previous samples.
When performing spatio-temporal reprojection, having a buffer describing the time for which a given sample had to accumulate is very valuable, a History Buffer. It can be used to drive a filter to blur stronger in regions with few accumulated samples or be used to estimate the variance of the current image (higher history would mean less variance).
While a history buffer is a useful thing to have, there's better ways of determining an accumulation factor than the ratio of successful reprojections such as the use of the change in luminance, we can use statistical analysis to prevent temporal lag instead.
constfloat radius = 2; //5x5 kernelfloat2 sigmaVariancePair = float2(0.0, 0.0);
float sampCount = 0.0;
for (int y = -radius; y <= radius; ++y)
{
for (int x = -radius; x <= radius; ++x)
{
// ⬇️ Sample current point data with current uvint2 p = ipos + int2(xx, yy);
float4 curColor = tColor.Load(p);
// 💡 Determine the average brightness of this sample// 🌎 Using International Telecommunications Union's ITU BT.601 encoding paramsfloat samp = luminance(curColor);
float sampSquared = samp * samp;
sigmaVariancePair += float2(samp, sampSquared);
sampCount += 1.0;
}
}
sigmaVariancePair /= sampCount;
float variance = max(0.0, sigmaVariancePair.y - sigmaVariancePair.x * sigmaVariancePair.x);
Christoph Schied (@c_schied) does this in A-SVGF estimating the spatial variance as a combination of an edge avoiding guassian filter (similar to the a-trous guided filter) and using this in a feedback loop to drive the accumulationFactor during spatio-temporal reprojection. In addition to managing accumulation, estimating variance can also allow for you to tone down the weight of your filter temporally, [Olejnik et al. 2020] uses a poisson disk filter similar to A-SVGF to better render contact shadows.
/**
* Variance Estimation
* Copyright (c) 2018, Christoph Schied
* All rights reserved.
* 🎓 Slightly simplified for this example:
*/// ⛏️ Setupfloat weightSum = 1.0;
int radius = 3; // ⚪ 7x7 Gaussian Kernelfloat2 moment = tMomentPrev.Load(ipos).rg;
float4 c = tColor.Load(ipos);
float histlen = tHistoryLength, ipos, 0).r;
for (int yy = -radius; yy <= radius; ++yy)
{
for (int xx = -radius; xx <= radius; ++xx)
{
// ☝️ We already have the center dataif (xx != 0 && yy != 0) { continue; }
// ⬇️ Sample current point data with current uvint2 p = ipos + int2(xx, yy);
float4 curColor = tColor.Load(p);
float curDepth = tDepth.Load(p).x;
float3 curNormal = tNormal.Load(p).xyz;
// 💡 Determine the average brightness of this sample// 🌎 Using International Telecommunications Union's ITU BT.601 encoding paramsfloat l = luminance(curColor.rgb);
float weightDepth = abs(curDepth - depth.x) / (depth.y * length(float2(xx, yy)) + 1.0e-2);
float weightNormal = pow(max(0, dot(curNormal, normal)), 128.0);
uint curMeshID = floatBitsToUint(tMeshID, p, 0).r);
float w = exp(-weightDepth) * weightNormal * (meshID == curMeshID ? 1.0 : 0.0);
if (isnan(w))
w = 0.0;
weightSum += w;
moment += float2(l, l * l) * w;
c.rgb += curColor.rgb * w;
}
}
moment /= weightSum;
c.rgb /= weightSum;
varianceSpatial = (1.0 + 2.0 * (1.0 - histlen)) * max(0.0, moment.y - moment.x * moment.x);
outFragColor = float4(c.rgb, (1.0 + 3.0 * (1.0 - histlen)) * max(0.0, moment.y - moment.x * moment.x));
Firefly Rejection
Firefly rejection can be done in a variety of ways, from adjusting how you're sampling during raytracing, to using filtering techniques or huristics about your output radiance.
A-Trous avoids sampling in a slightly dithered pattern to cover a wider radius than would normally be possible in a 3x3 or 5x5 guassian kernel while at the same time having the ability to be repeated multiple times, and avoid bluring across edges thanks number of different inputs.
This can be done in combination with:
Subsampling according to a dithering pattern, thus reducing the number of samples in your bluring kernel even more.
All of these classes of algorithms rely on reusing data, thus when that isn't possible, such as in the case of fast moving objects, highly complex geometry, or areas with little history information, the quality of each method decreases. There are ways to make use of some cached data to help avoid this, such as using irradiance caching to have a better default color as in the case of Minecraft RTX.
Direct Normals
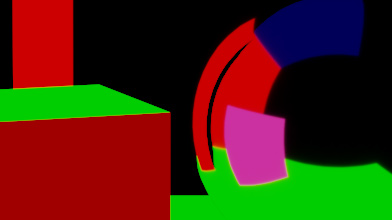
First Bounce Normals
Spatio-temporal reprojection is also significantly more difficult with reflections, so often times denoisers will rely on first-bounce data, where the normals of a reflective surface, positional data, etc. are based on the first reflection rather than the original surface.
Conclusion
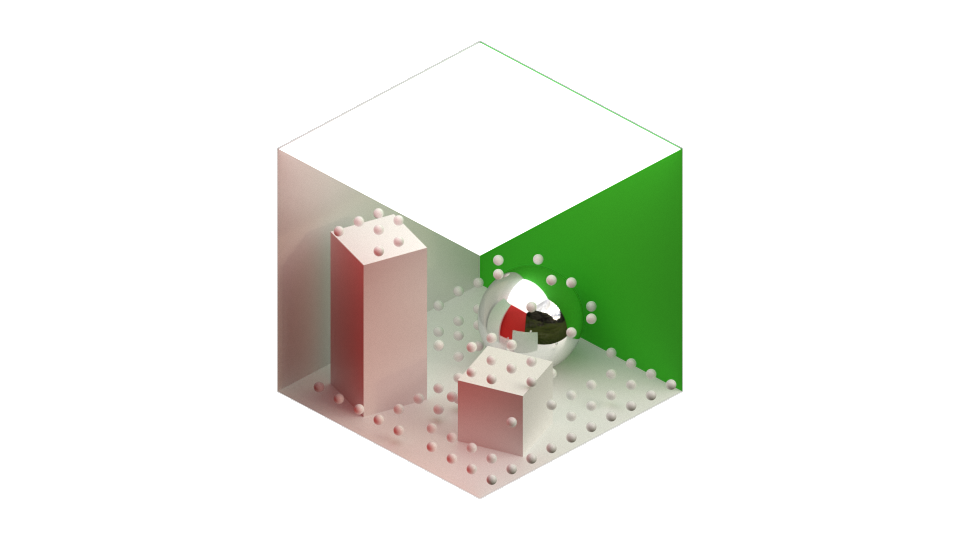
Denoising can help bridge the gap between a low sample per pixel image and ground truth by reusing previous samples through spatio-temporal reprojection - adaptively resampling radiance or statistical information for importance sampling, and using filters such as fast gaussian/bilateral filters or AI techniques like denoising autoencoders and upscaling though super sampling.
While denoising isn't perfect as temporal techniques can introduce a lag in radiance and any filter will introduce some loss of sharpness due to it attempting to blur the original image, guided filters can help maintain sharpness, and adaptively sampling or increasing samples per pixels for each frame can make the difference between denoised and ground truth images negligable. Still, there's no substitute for higher samples per pixel, so experiment with these techniques with different sample per pixel (spp) counts.
AMD's FidelityFX SSSR features spatio-temporal reprojection to denoise screen space reflections. Here's their Github. AMD also released several denoisers for reflections and shadows on thisGithub Repo.
NVIDIA has released an SDK to itegrate Deep Learning Super Sampling here. AMD's Fidelity FX Super resolution is also available for developers to integrate into their applications.
Ingo Wald (@IngoWald)) released a Optix course
which showcases how to use the Optix denoiser here.
Christof Shied (@c_schied) and Alexey Panteleev (@more_fps) of NVIDIA wrote the denoiser for Quake 2 RTX which is on Github here.
Xiaoxu Meng released the source
of their Neural Bilateral Grid paper here.
In the University of Pennsylvania's CIS565 course, a number of students, teaching assistants, and former students made awesome projects that implement the latest in denoising research:
CUDA SVGF by Zheyuan Xie, Yan Dong, and Weiqi Chen
Tomasz Stachowiak (@h3r2tic) et al. designed the Pica Pica renderer, an amazing reference hybrid renderer featured in Ray Tracing gems. Their talk is available here.
Edge-Avoiding À-Trous Wavelet Transform for fast Global Illumination Filtering Holger Dammertz (@NeoSpark314), Daniel Sewtz, Johannes Hanika and Hendrik P.A. Lensch High Performance Graphics 2010 jo.dreggn.org
[He et al. 2012]
Guided Image Filtering Kaiming He, Jian Sun and Xiaoou Tang 2012 kaiminghe.com
Removing the Noise in Monte Carlo Rendering with General Image Denoising Algorithms Nima Khademi Kalantari and Pradeep Sen Eurographics 2013 research.nvidia.com
[Khademi Kalantari et al. 2015]
A Machine Learning Approach for Filtering Monte Carlo Noise Nima Khademi Kalantari, Pradeep Sen and Steve Bako ACM Transactions on Graphics (TOG) 2015 cvc.ucsb.edu
[R. Alla Chaitanya et al. 2017]
Interactive Reconstruction of Monte Carlo Image Sequences using a Recurrent Denoising Autoencoder Chakravarty R. Alla Chaitanya, Anton S. Kaplanyan, Christoph Schied (@c_schied), Marco Salvi (@marcosalvi), Aaron Lefohn, Derek Nowrouzezahrai and Timo Aila ACM 2017 research.nvidia.com
[Vogels et al. 2018]
Denoising with Kernel Prediction and Asymmetric Loss Functions Thijs Vogels, Fabrice Rousselle, Brian Mcwilliams, Gerhard Rothlin, Alex Harvill, David Adler, Mark Meyer and Jan Novak ACM, ACM Transactions on Graphics 2018 doi.acm.org
[Wang et al. 2018]
A Fully Progressive Approach to Single-Image Super-Resolution Yifan Wang, Federico Perazzi, Brian McWilliams, Alexander Sorkine-Hornung, Olga Sorkine-Hornung and Christopher Schroers CoRR 2018 arxiv.org
[Xu et al. 2019]
Adversarial Monte Carlo Denoising with Conditioned Auxiliary Feature Modulation Bing Xu, Junfei Zhang, Rui Wang, Kun Xu, Yong-Liang Yang, Chuan Li and Rui Tang ACM, ACM Transactions on Graphics 2019 adversarial.mcdenoising.org
[Meng et al. 2020]
Real-time Monte Carlo Denoising with the Neural Bilateral Grid Xiaoxu Meng, Quan Zheng, Amitabh Varshney, Gurprit Singh and Matthias Zwicker Eurographics 2020 diglib.eg.org
[Işık et al. 2021]
Interactive Monte Carlo Denoising using Affinity of Neural Features Mustafa Işık, Krishna Mullia, Matthew Fisher, Jonathan Eisenmann and Michaël Gharbi Siggraph 2021 mustafaisik.net
Neural Temporal Adaptive Sampling and Denoising Jon Hasselgren, Jacob Munkberg, Marco Salvi (@marcosalvi), Anjul Patney and Aaron Lefohn Eurographics 2020 research.nvidia.com
Image Super-Resolution Using Deep Convolutional Networks Chao Dong, Chen Change Loy, Kaiming He and Xiaoou Tang CoRR 2015 arxiv.org
[Ledig et al. 2016]
Photo-Realistic Single Image Super-Resolution Using a Generative Adversarial Network Christian Ledig, Lucas Theis, Ferenc Huszar, Jose Caballero, Andrew P. Aitken, Alykhan Tejani, Johannes Totz, Zehan Wang and Wenzhe Shi CoRR 2016 arxiv.org
[Xiao et al. 2020]
Neural Supersampling for Real-time Rendering Lei Xiao, Salah Nouri, Matt Chapman, Alexander Fix, Douglas Lanman and Anton Kaplanyan Facebook Research 2020 research.fb.com
[Mathew Thomas et al. 2022]
Temporally Stable Real-Time Joint Neural Denoising and Supersampling Manu Mathew Thomas, Gabor Liktor, Christoph Peters (@MomentsInCG), Sungye Kim, Karthik Vaidyanathan and Angus G. Forbes High Performance Graphics 2022 momentsingraphics.de
[Korein et al. 1983]
Temporal Anti-Aliasing in Computer Generated Animation Jonathan Korein and Norman Badler ACM 1983 dl.acm.org
[Yang et al. 2020]
A Survey of Temporal Antialiasing Techniques Lei Yang, Shiqiu Liu and Marco Salvi (@marcosalvi) Computer Graphics Forum 2020 onlinelibrary.wiley.com
Gradient Estimation for Real-Time Adaptive Temporal Filtering Christoph Schied (@c_schied), Peters, Christoph and Carsten Dachsbacher ACM 2018 cg.ivd.kit.edu
[Koskela et al. 2019]
Blockwise Multi-Order Feature Regression for Real-Time Path Tracing Reconstruction Matias Koskela and Kalle Immonen ACM Transactions on Graphics (TOG) 2019 tut.fi
Cinematic Rendering in UE4 with Real-Time Ray Tracing and Denoising Edward Liu, Ignacio Llamas, Juan Cañada and Patrick Kelly Ray Tracing Gems 2019 realtimerendering.com
[Veach 1998]
Robust Monte Carlo Methods for Light Transport Simulation Eric Veach Stanford University 1998 graphics.stanford.edu
[Pantaleoni 2020]
Online Path Sampling Control with Progressive Spatio-Temporal Filtering Jacopo Pantaleoni NVIDIA 2020 arxiv.org
Scaling Probe-Based Real-Time Dynamic Global Illumination for Production Zander Majercik, Adam Marrs, Josef Spjut and Morgan McGuire (@CasualEffects) arXiv 2020 arxiv.org
[Talbot et al. 2005]
Importance Resampling for Global Illumination Justin Talbot, David Cline and Parris Egbert Eurographics 2005
 Alain Galvan ·10/6/2020 6:00 PM · Updated 2 years ago
Alain Galvan ·10/6/2020 6:00 PM · Updated 2 years ago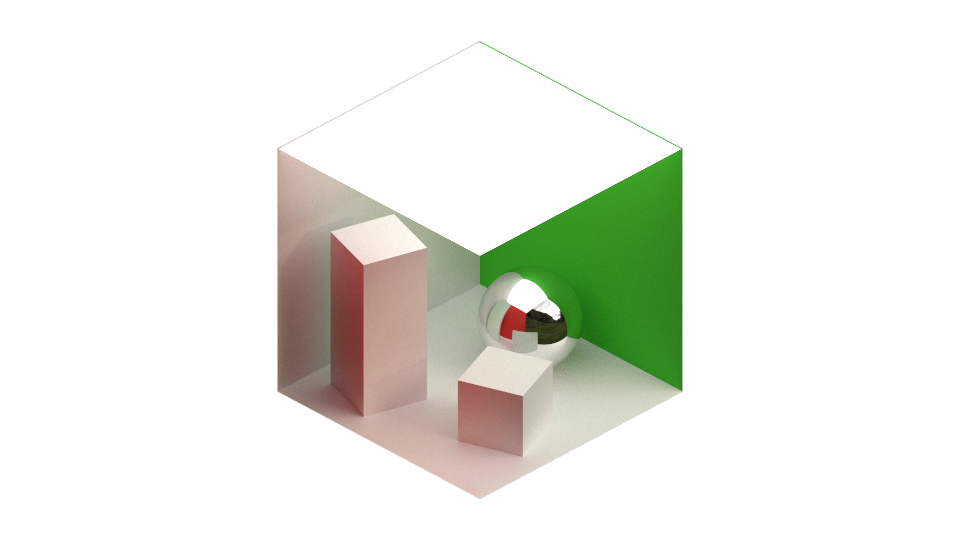






 Ingo Wald (
Ingo Wald (
 Eric Haines (
Eric Haines (